
According to the World Health Organization (WHO), there are 0.29 billion Blind and Vision impaired people worldwide (BVI), and 43 million are blind. Approximately 90% of them require assistance to leave their homes, and the remaining 10% that can go out independently usually only follow one or two routine routes. How can a robot help the visually impaired people navigate their daily routes safely, efficient, and independently?


Roselle:
S. Cai, A. Ram, Z. Gou, M.A.W. Shaikh, Y.A. Chen, Y. Wan, K. Hara, S. Zhao and D. Hsu. Navigating Real-World Challenges: A quadruped robot guiding system for visually impaired people in diverse environments. In Proc. ACM Conf. on Human Factors in Computing Systems, 2024.
Paper Video
Blind and Visually Impaired (BVI) individuals face two key challenges in navigating unfamiliar places: wayfinding and obstacle avoidance. Wayfinding entails determining one’s current location, charting a path to the destination, and maintaining orientation in between. Obstacle avoidance requires the user to stay away from static objects and dynamic objects. In addition, in outdoor environments with different terrains, the user needs to prepare for terrain changes such as going from cement ground to grass or stepping down a curb. These challenges can be especially daunting in crowded or disorganized settings, such as cafeterias or railway stations.
We outlined the following design prerequisites for our guidance system tailored to the challenges listed above, based on our interview with visually impaired users.
D1 – Provide a “walkable path” to the destination. The system should be able to identify a path that is effective and smooth.
D2 – Avoid obstacles proactively. Guide users around obstacles with real-time path adjustments and haptic or leash feedback.
D3 – Navigate both indoor and outdoor environments across various terrains. A helpful assistive device should possess the capability to guide users in both indoor and outdoor settings, and adapt to diverse terrains.
D4 – Provide unambiguous, intuitive, and effective guidance. The ideal solution should be easy to process and clear enough for users to decide their actions, thereby conserving cognitive resources and reducing navigation-related stress.
D5 – Preemptive information about change in direction or terrain through voice, paired with slowing down or making a stop.
D6 – Provide controls for speed and direction modulation onto the leash.
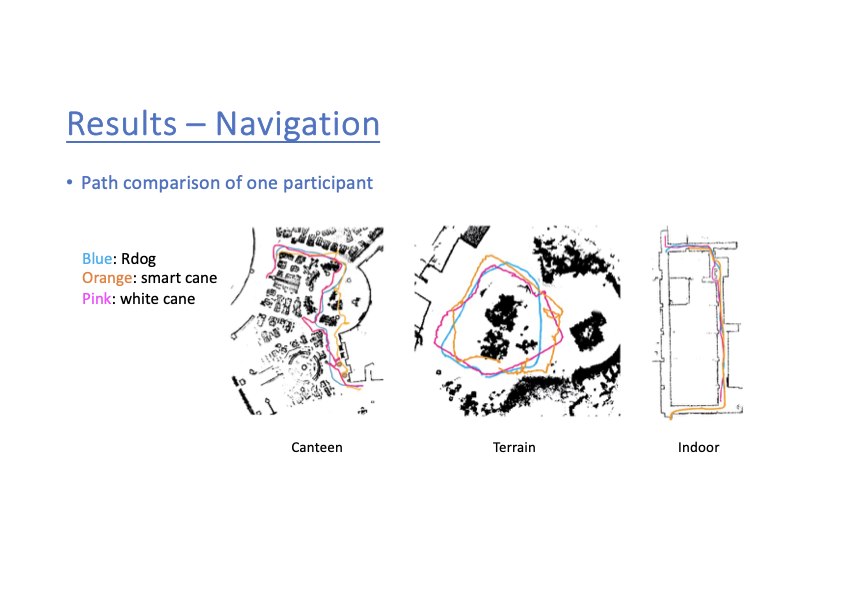
Results show that RDog achieves superior navigation performance compared to white canes and smart canes, while reducing cognitive load of the users.